Precision
In cooperation with Christian Hartz (EproTec GmbH) in 2021.

Concept
The general idea of this project was to develop an artificial upper limb prothesis which is self-powered by the users movement. After being inspired of the open source project „ROBOHAND“ I started imagine the possibilities of creating a whole prosthesis adding the possibilities of additive manufacturing using 3D Printers allowing to print different shore hardness during one print into predefined areas of the object. This technology allows to create hinges which only work because of the characteristics of their geometry.
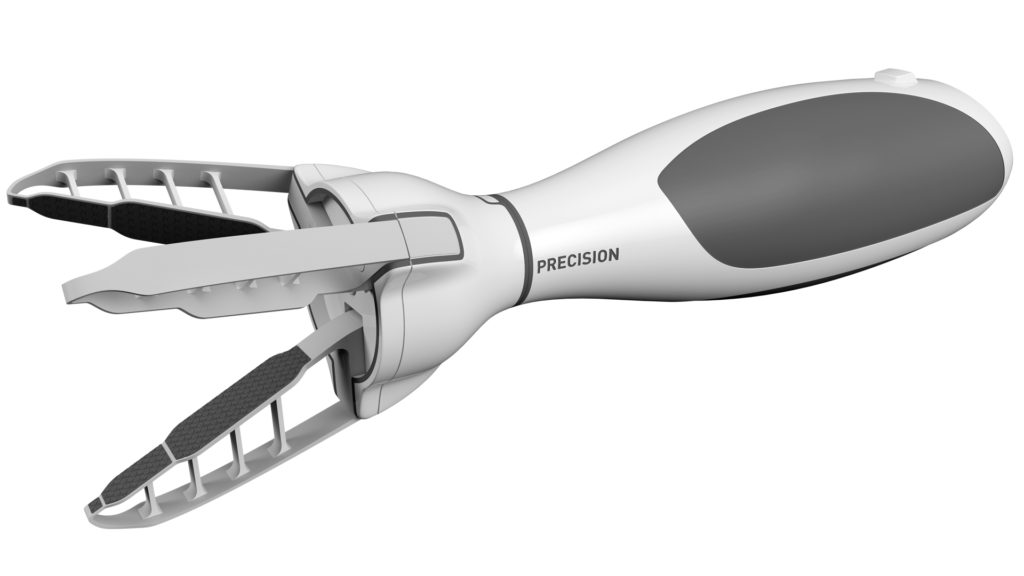
Design
The prothesis is subdivided in 2 main parts. The Design of the back end is more organic because it holds the individual remaining limb. Every shaft has a perfect fit due to 3D scan technology. The Front End in this case consists of an adapter with 3 fin ray fingers. Underlining its function the appearance of this part is more technical.
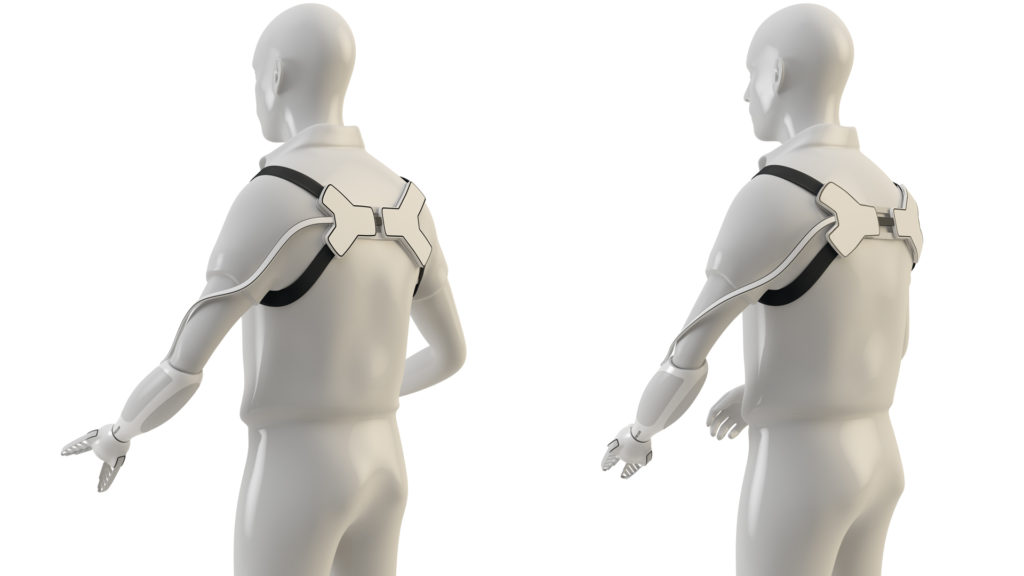
Self-controlled
Build in gearing is connects the prosthesis to the shoulder belt. Containing 3 independent controlled strings allows the patient to move the fin ray fingers separately by moving the shoulder up or down while bending.
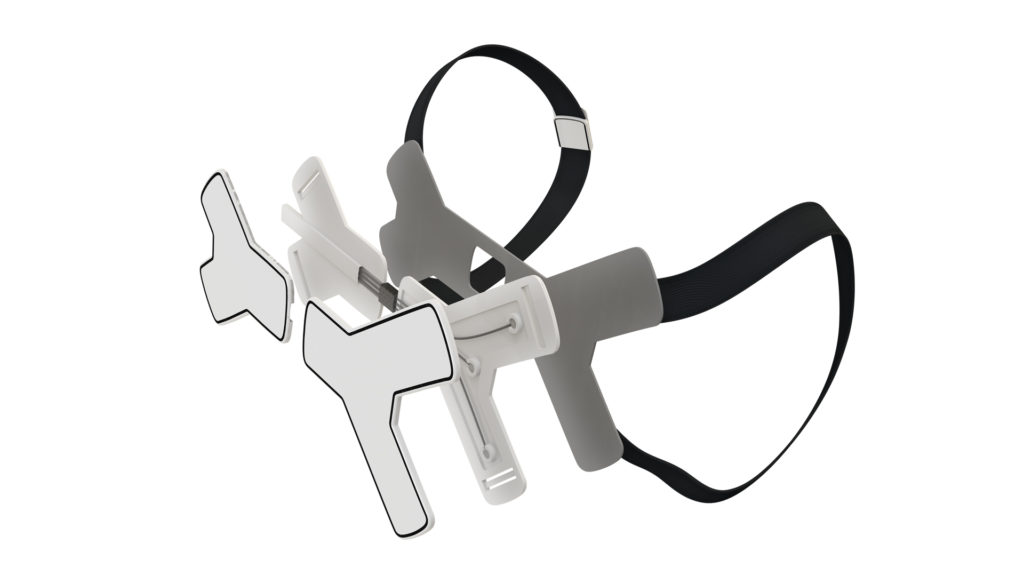
Set-up
Containing 3 independent controlled strings it allows the patient to control the fin ray fingers separately by bending its shoulder.
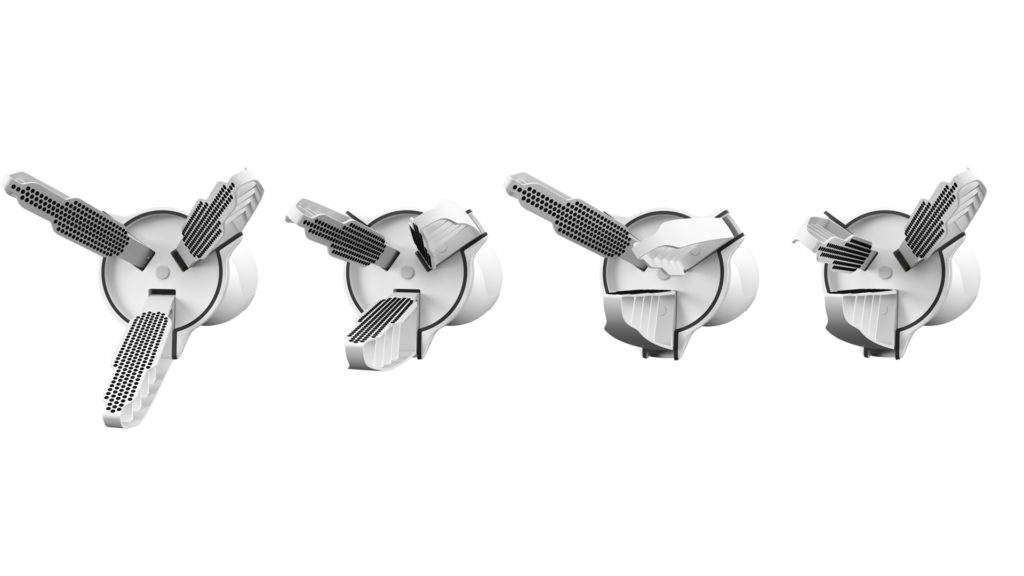
Finray
Front view of the different possibilities of opening and closing the adapter consisting of three finray fingers. The concept allows the patient to change the adapter for any current need.

Variation
Different color and grip variations. The more the patient accepts the prosthesis as a personalized artificial limb the less problem appear considering handling in public or the possible appearance of phantom pain.